Control de un vehículo aéreo

Control de un vehículo aéreo no tripulado autónomo para la precisión.
Control of an Autonomous UAV for Precision.
Wilber Ortiz Aguilar1, Jorge Isaac Avilés2, Pedro García Aria3
1 Facultad de Ciencias Matemáticas y Físicas - Universidad de Guayaquil, Guayaquil, Ecuador, E-mail: ortizwilber74@gmail.com
2Facultad de Ciencias Matemáticas y Físicas - Universidad de Guayaquil, Guayaquil, Ecuador, E-mail: jorge.avilesm@ug.edu.ec
3Facultad de Ciencias Matemáticas y Físicas - Universidad de Guayaquil, Guayaquil, Ecuador, E-mail: pedro.garciaa@ug.edu.ec
Resumen. El uso y aplicación de vehículos aéreos no tripulados (UAV) se ha expandido en diversas áreas del desarrollo humano, en la actualidad podemos encontrarlos aplicados en el entretenimiento, fotografía aérea, investigaciones, operación y rescate, agricultura de precisión. En gran medida su extendido uso se ha debido a la posibilidad de expansión y compatibilidad tanto de su hardware como el software, también a la documentación extendida y librerías (SDK) liberadas por los fabricantes, las cuales ayudan a los desarrolladores para crear aplicaciones bajo múltiples plataformas, con desarrollos genéricos o tan puntuales como los necesiten. Independiente del área de aplicación, el UAV requerirá de controles básicos para su navegación, pero demandará precisión y especialización de acuerdo con lo requerido para su uso puntual. Este trabajo presenta los prototipos y la implementación de un Sistema de control en tierra para el control y navegación autónoma de un UAV en la aplicación de tareas de agricultura de precisión así como las bases para un sistema de control neutrosófica.
Palabras claves: Vehículo aéreo no tripulado, Control de Tierra, UI, Control Neutrosófica
Abstract. The use and application of unmanned aerial vehicles (UAVs) has expanded in several areas of human development, currently we can find them applied in entertainment, aerial photography, research, operation and rescue, precision agriculture. In great measure its extended use has been due to the possibility of expansion and compatibility of both its hardware and software, also to the extended documentation and libraries (SDK) released by manufacturers, which help developers to create applications under multiple platforms, with generic developments or as specific as needed. Regardless of the application area, the UAV will require basic controls for its navigation, but will demand precision and specialization as required for its punctual use. This work presents the prototypes and implementation of a Ground Control System for the control and autonomous navigation of a UAV in the application of precision agriculture tasks as well as the bases for a neutral control system.
Keywords: Unmamned aerial vehicle, Ground Control, UI, Control Neutrosófica
INTRODUCCIÓN
El término unmanned aerial veicle ( UAV) fue acuñado a inicios de 1990s como un reemplazo del término remotely piloted vehicle (RPV) usado durante la guerra de Vietnam, describe a una aeronabe robotica que no carga un operador humano y puede ser piloteada remotamente[1] por un humano operador o por una computadora a bordo en el caso de control autónomo de vuelo[2]. Con la introducción de nuevos métodos, tecnologías y mejoras en aeronáutica, el área de aplicación de los UAV se ha expandido y diversas compañías han invertido en investigación y desarrollo para exploar el potencial en ejecución de nuevas tareas que aprovechan las características de tamaño y poder computacional de las actuales aeronaves y sus controles automáticos[3], [4].
La diversificación y ampliación de las áreas en las que se utilizan UAVs tuvo un crecimiento durante la última década, el uso principal estaba cerrado en el campo tecnológico militar, pero gracias a la proliferación de nuevas plataformas de fácil adquisición que están en la capacidad de soportar nuevos sensores, junto con una tendencia a miniaturizar los componentes y la inclusión de librerías que permiten a desarrolladores, investigadores o entusiastas de la materia extender las capacidad de ejecución de las tareas de los UAVs, se ha creado un nuevo ecosistema en la construcción de aeronaves capaces de cubrir las necesidades y restricciones de nuevos mercados. La utilidad de los UAVs actualmente encuentra un gran nicho en la gestión de recursos naturales y aplicaciones de teledetección con aplicaciones que van desde el monitoreo de bosques, calidad de aire, hasta la agricultura de precisión[5].
Precision Agriculture
La agricultura de precisión es un concepto que nace a principios de los 90s como una solución eco-amigable para la gestión y desarrollo de granjas de mediana y gran escala. Este tipo de agricultura depende del desarrollo tecnológico y de la investigación en diversos campos que estudian nuevos enfoques para solucionar sus problemas con el fin de lograr una agronomía sostenible[6]. Se han agrupado los campos tecnológicos vinculados a la agricultura de precisión en tres componentes claves: Data Collection, Analysis, and Variable Rate Control[7].
El uso de UAV en la agricultura de precisión inició con un modelo de aeronave Yamaha RMAX diseñada para el control de plagas y monitoreo de cultivos, posterior a este modelo, el concepto se extendió hacia la mejora de la productividad, riego, fumigación, especialmente el monitoreo de cultivos por medio de cámaras multiespectrales montadas en los UAV. Las cámaras montadas en las aeronaves pueden tomar fotos durante el vuelos y relacionarlas con puntos geográficos para luego en un análisis posterior, los expertos pueden encontrar y geolocalizar con precisión áreas marcadas para riego, tratamiento o fumigación, reduciendo drásticamente el desperdicio de insumos y aumentando la efectividad de los tratamiento[8][9].
Fig. 1 Yamaha RMAX[10]
Ground Control Station
Un UAV básicamente se encuentra formado por tres grandes componentes principales conocidos como subsistemas: Unmanned Aircraft, Command and Control Link/ Data Link, Ground Control Station (GCS). Un UA puede ser controlada de forma remota con un piloto en tierra o por medio de sistemas de automatización dinámica con un plan de vuelo previamente programado utilizando coordenadas referenciales de GPS[11].
El GCS es considerado uno de los componentes más críticos para el desarrollo de las misiones de vuelo para los UAV porque le permite al piloto especificar tareas que serán ejecutadas por la plataforma, así como también supervisar el estado de la ejecución de las mismas y recibir información los componentes a bordo. Una interfaz gráfica amigable, eficiente y personalizada de un GCS es la clave para el control de las aeronaves desde tierra independientemente del área de aplicación[12]. Para que un GCS funcione de manera efectiva debe integrar múltiples tecnologías y funciones en las que se incluyen hardware, software, diseño de interfaces humano-ordenador, finalmente se hace necesario que la interfaz de usuario y características de un GCS estén relacionados con el tipo y condiciones de las misiones, con la capacidad de escalar o adaptarse para futuras aplicaciones [13].
Ground Control Station for Precision Agriculture
El objetivo del trabajo es implementar una estación de control en tierra para un vehículo no tripulado de bajo costo sobre plataformas de código abierto compatibles con dispositivos móviles, que permitan a los desarrolladores personalizar la interfaz de usuario y escalar su capacidad. Además de soportar la carga de misiones y rutas preconfiguradas para vuelos autónomos, aplicados en campos de sembrío. Finalmente verificar su funcionamiento con una plataforma de aeronave y realizar simulaciones de vuelo en un entorno virtual[14]. En las secciones previas se describió la importancia de la personalización de la interfaz de usuario del GCS dependiendo del tipo de aplicación y misiones del UAV. Esta sección describe el montaje de un GCS experimental en el control y ejecuciones de misiones autónomas para el campo de la agricultura de precisión.
Fig. 2. Arquitectura de un AUV
Hardware of Aircraft
Para el desarrollo del proyecto se utilizó como UAV un Quadcopter montado en con platorma DJI F450 personalizada con los siguientes componentes: 1 DJI F450 Frame with integrated PCB Wiring, 4 x 15A/30A E300 OPTO ESCs, 4 x 2212 920kv E300 3s or 4s motors, 4 x Propellers NEW Self Tightening, 1 x 14.8V 4000mah 30C Li-Po Battery.
Existen en el mercado diferentes tipos de placas automáticas para el control del sistema (ACS), entre las diferencias principales se encuentra la capacidad y libertar proporcionada por el fabricante para ampliar las funciones que proporciona al UAV[15]. La placa original para el control de vuelo (NAZA M V2) fue reemplazada la tarjeta por una tarjeta 3DR PIXHAWK 4. Las tarjetas PIXHAWK son una de las alternativas disponibles comercialmente, cuentan con un diseño similar, pero con una arquitectura de control abierta, de esta manera proporciona fácil acceso a todas las mediciones de bajo nivel y aceptando la entrada de computadoras de alto nivel. Son un producto de código y hardware abierto que permite adaptar cada detalle de la necesidad del proyecto al dispositivo[16][17].

Fig. 1. DJI F 450
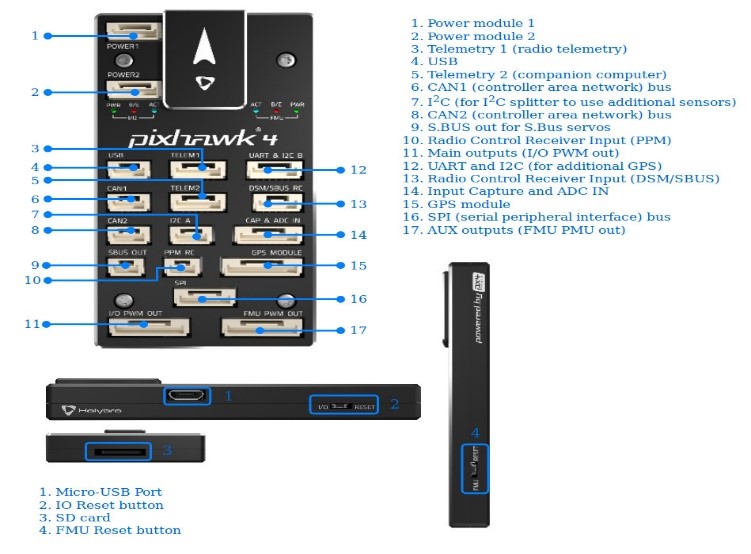
Fig. 2. Tarjeta PIXHAWK [18]
Ground Control Station Software
En esta sección discutiremos las plataformas open-source que utilizadas para desplegar un mobile GCS y realizar las respectivas pruebas de vuelo en un entorno real y simulado. En la sección anterior fue detallada la plataforma de hardware utilizada para el control de vuelo: PIXHAWK soporta dos pilas de vuelo PX4[19] y ArduPilot[16]. Ambas pilas de vuelo son ampliamente soportadas por la comunidad de desarrolladores y en el mercado cuentan con un despliegue robusto de sus versiones actuales, para este proyecto fue seleccionada PX4.
La ventaja de utilizar plataformas de software y hardware abierto nos permite utilizar high-level APIs y soportar protocolos de comunicación para controlar los UAV de manera remota desde una PC o un dispositivo móvil en tierra. DroneKit de 3Drobotics, es una plataforma para los UAV que ofrece SDK y APIs Web para desarrollo de aplicaciones para drones[20], incluye comandos de alto nivel para dirigir los UAV independiente de la plataforma. Las aplicaciones desarrolladas con DroneKit agregan nuevas características en el comportamiento de la UAV y ejecutan tareas computacionalmente sensibles en el tiempo, tales como el control y planificación de rutas[21], una de las características buscadas en este proyecto para la agricultura de precisión.
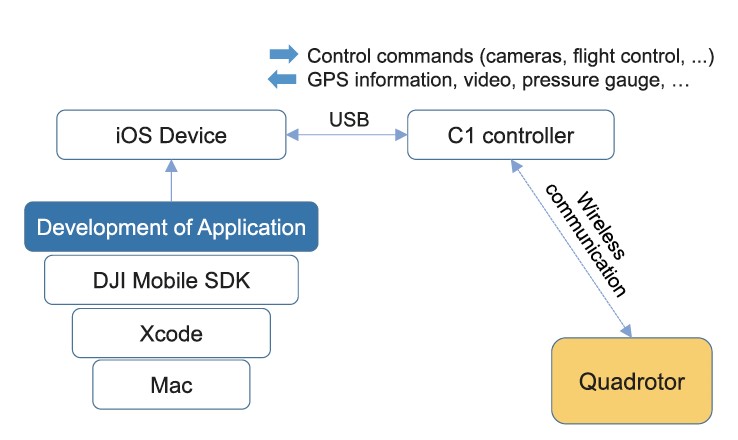
Fig. 2. Flujo detallado de la arquitectura del GCS
Para la comunicación punto a punto se utiliza el protocolo de comunicación MAVLink, el cual proporciona retroalimentación al operador, telemetria, heartbeat y estado del sistema[22], a través de conexiones UDP, TCP, Bluetooth o interfaces USB conectado a la aplicación de software GCS. Existen diversas aplicaiones de software GCS que soportan el protocolo de comunicación MAVLink[23]. Se utilizó Tower[24] como base para la aplicación Android Mobile GCS. Tower es una aplicación para dispositivos Android para controlar UAV y está montado sobre DroneKit-Android[25], los aplicativos generados cuentan con una compatibilidad con dispositivos con versiones superiores a Android 4. La Figura 4 nuestra la arquitectura de los componentes del GCS, la plataforma que lo soporta y la interacción con el UAV. El proyecto busca construir una mobile GCS que permita conexiones punto a punto con el UAV por medio de Wi-fi o por medio de USB conectada al control de la aeronave, como lo muestra la Figura 5
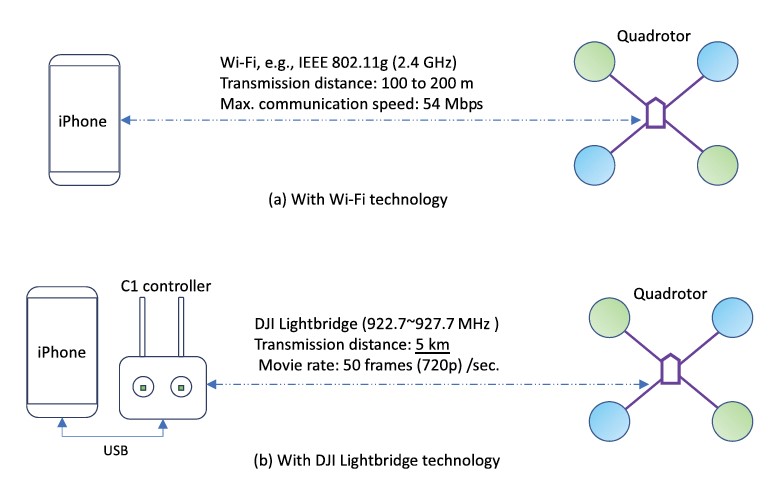
Fig. 3 Nljl
Ground Control Station Building
La aplicación mobile GCS para dispositivos Android está conformada por dos partes modulares: las librerías responsables de transmitir y recibir los datos entre el dispositivo-UAV y a la interface gráfica de la aplicación (UI)[26] , este sistema de arquitectura está basado en el patrón de Diseño MVC que separa la interacción con el usuario del modelo de datos y el controlador. De esta manera se pueden diseñar interfaces limpias, personalizadas enfocadas a la agricultura de precisión y abstraer el resto de capas. (ver Fig 5).
Fig. 4. GCS Application concept
Tower como la mayoría de softwares de GCS disponibles, a nivel de interface de usuario ofrece todas funcionalidades a modo de control en pantalla, muchas de ellas no serán utilizadas en aplicaciones como la agricultura de precisión y pueden producir una sobrecarga cognitiva durante las tareas de operación al piloto, incluso algunos con avanzada experiencia son propensos a producir accidentes al seleccionar por error cualquier control mostrado en pantalla. Para eliminar estos problemas y desarrollar una aplicación personalizada y funcional, debemos modificar la capa de vista desde código fuente de Tower, cambiando estilos, colores, removiendo controles, modos de vuelo innecesarios, ajustando configuraciones de fábrica, eliminando características orientadas al hobby.
El proyecto Tower se encuentra publicado bajo una licencia GNU V3, lo cual nos permite clonar su codigo desde su repositorio oficial[24] e importarlo como un nuevo proyecto en Android Studio para personalizar y generar una versión de la aplicación ajustadas a la necesidad buscada. Para el desarrollo del GCS para agricultura de precisión se realizaron las siguientes acciones:
- Cambio de estilos del UI
- Cambio de nombre del proyecto
- Cambio de logo e ícono
- Ajustes de configuración de cámara
- Removidas configuraciones orientado a Hobby
- Forzar conexión UDP
- Conexión automática por Wifi
- Simplificación de lista de opciones de vuelo
- Reducción de menús
- Simplificación de la pantalla
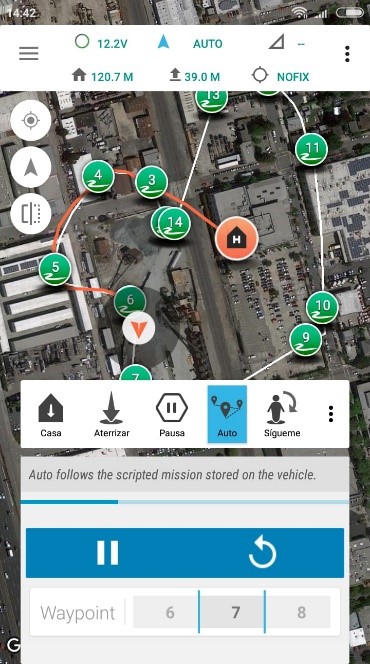
Fig. 5 Interface grafica del GCS
Pruebas y Simulación
Una vez construida la aplicación e instalada en un teléfono Samsung S7 y una Tablet Galaxy Note, para probar el GCS se planificaron dos tipos de pruebas:
- Vuelo real usando la plataforma completa del AUV
- Vuelo simulado utilizando un ambiente virtual.
La primera prueba que utiliza el hardware completo tiene la finalidad de probar la conexión entre el GCS y el UAV, fue realizada en un campo abierto sin ningún tipo de interrupción entre los puntos. La prueba se realizó durante el día en condiciones climáticas normales y se logró armar y desarmar el UAV , realizar un vuelo corto sin ningun problema reportado.
Para poder validar los escenarios de vuelo sobre un campo granja usando misiones programadas fue necesario utilizar un entorno de simulación. El entorno de simulación respetó la arquitectura real usando un modelo de simulación Software in the Loop (SITL)[27]. Para lograrlo, en una laptop con sistema operativo Ubuntu se instaló el entorno de simulación conformado por SITL y MAVProxy como lo muestra la arquitectura de la Figura 6.
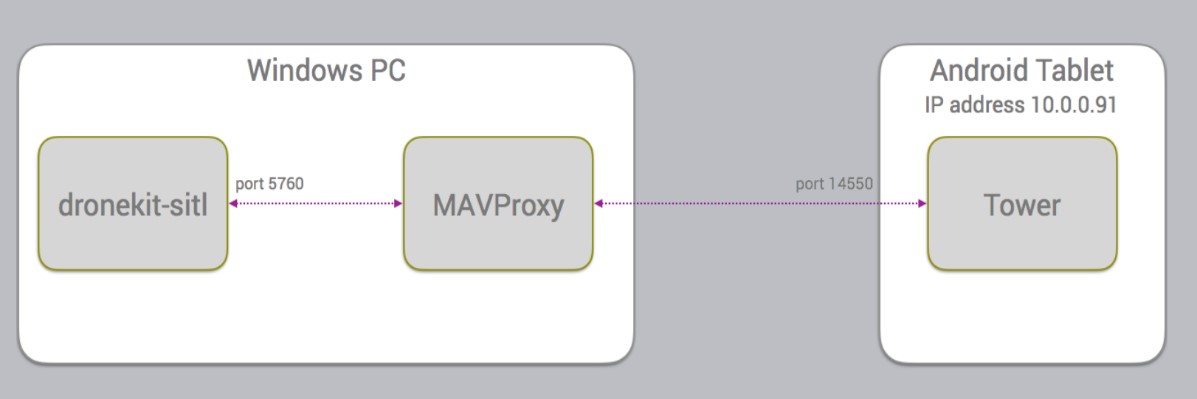
Fig. 6 Arquitectura para simulación de vuelo
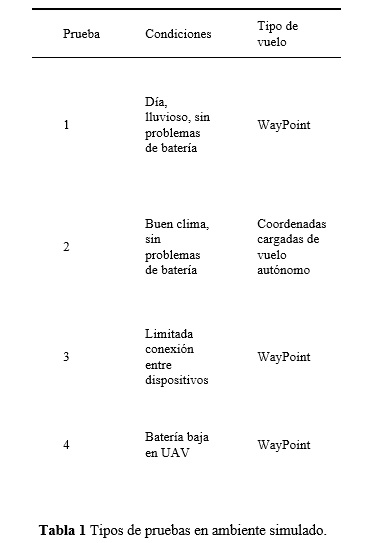
La Tabla 1 muestra los diferentes tipos de pruebas en el ambiente simulado con diferentes condiciones, se realizaron 4 vuelos supervisados por un piloto con experiencia, las pruebas tipo WayPoint permitieron realizar vuelos en circulo, escaneo de regiones de interes, etc. Para las pruebas de reconocimiento fue cargado un archivo de coordenadas, el vuelo se ejecutó sin problemas como lo muestra la figura 7. Las condiciones de batería bajan y conexión limitada fueron agregadas para poder identificar gráficamente el feedback en pantalla del estado de la misión durante el vuelo. El simulador permite conectarse a diferentes tipos de UAV emulando distintos tipos de hardware y su comportamiento, para cada UAV que se prueba es necesario crear una instancia única de simulador, esta simulación consiste en un intercambio de mensajes entre el GCS.y la plataforma.
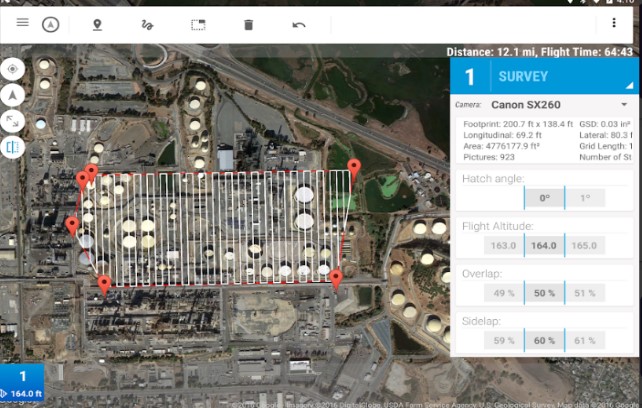

Figura 7. Interfaz Gráfica
Se propone además un sistema de control basado en el uso de la lógica neutrosófica para UAV[28]–[30]. El algoritmo del controlador neutrosófica propuesto es como indicado abajo[31], [32].

Paso 1: Registrar las medidas de todas las variables que representan las condiciones relevantes del proceso controlado.
Paso 2: Las medidas adquiridas se convierten a conjuntos neutrosóficos apropiados para capturar la medición verdad, falsedad e indeterminación usando verdad, falsedad y funciones de pertenencia de indeterminación respectivamente. Este paso se denomina paso de neutrosoficación[33].
Paso 3: Las mediciones neutrosificadas son luego utilizadas por el motor de inferencia para evaluar las reglas de control almacenadas en el base de la regla neutrosófica. Esta evaluación resultará en un conjunto neutrosófico o varios conjuntos neutrosóficos que definirse sobre el universo de posibles acciones.
Paso 4: Este conjunto neutrosófico luego se convierte, en el último paso de ciclo, en un solo valor (nítido), con triplete formato como x (t,i,f); cual seria el mejor representante del conjunto neutrosófico derivado. Este proceso se llama desneutrosoficación.La relación entre significado y sentido. Se refiere a la dependencia de la palabra en el contexto que se usa, al respecto plantea:
Es algoritmo permite el manejo de la incertidumbre, vaguedad, ambigüedad, imprecisión, incompletitud, inconsistencia, redundancia y contradicción en los datos[34]–[36].
Conclusiones y Trabajos Futuros
En este artículo, un sistema de control en tierra fue focalizado y diseñado para quadrotor para de control automático y remoto de la aeronave utilizando dispositivos móviles Android. El proyecto utilizó una plataforma existente llamada Tower, diferentes modificaciones fueron realizadas para adaptar la plataforma a un enfoque de agricultura. Demostramos la factibilidad de transformar una plataforma UAV comercial en una solución extensible con la capacidad de agregar nuevas funcionalidades a la pila de componentes del sistema, inclusive la posibilidad de utilizar GCS que permitan modificar la interfaz de usuario para adaptarlo a necesidades puntuales. Evidenciamos la facilidad de utilización de las diferentes librerías empleadas, la calidad de código, documentación de este y acceso a sus open-API que nos permitieron crear un producto en corto tiempo y con presupuesto bajo.
Como futuros trabajos, sugerimos realizar un estudio sobre lineamientos gráficos y diseño de UI para GCS, focalizarlo en el caso agricultura de precisión, realizar un estudio etnográfico de los posibles pilotos de esta solución para determinar o definir principios de diseños de UI y UX que puedan permitirnos construir interfaces más intuitivas. También sugerimos realizar pruebas en campos reales utilizando diversos tipos de aeronaves con la finalidad de conducir un estudio de usabilidad en campo, armar al UAV con cámaras multiespectrales para la toma de fotografías aéreas. Finalmente sugerimos expandir a otros paradigmas de interacción con el usuario como el uso de gestos para control, comandos guiados por voz y el soporte en plataformas como relojes inteligentes. Analizar el uso de tecnología de realidad aumentada para la identificación en vuelo de POIs geográficos que marquen límites en las plantaciones. Se propone además seguir desarrollando el algoritmo de control neutrosófica
CONCLUSIONES
La Alternativa metodológica demanda a que hagamos del análisis del texto un proceso que enfatice los aspectos teórico – metodológicos referidos a la enseñanza del enfoque cognitivo, comunicativo y sociocultural, el cual propone descubrir los nexos entre la cognición, el discurso y la sociedad con un marcado carácter interdisciplinario, multidisciplinario y transdisciplinario, para favorecer el desarrollo de las habilidades comunicativas de los estudiantes de la carrera de Cultura Física.
-
Con la aplicación de la Alternativa propuesta, resulta significativo prestar una especial atención a la funcionalidad textual de las estructuras gramaticales, pues se analizarán teniendo en cuenta la importancia que desempeñan en la construcción del significado, así como atendiendo a la intención y a la finalidad comunicativas.
-
Las tareas docentes deberán ser integradoras y destacar lo más importante del análisis realizado, es decir, se podrán tener en cuenta los tipos de lectura, la información que brindan los textos, el análisis lexical y morfosintáctico, pero todo encaminado a aportar a la comprensión del texto.
-
El profesor como mediador en este proceso desempeña un importante papel en el desarrollo de motivos e intereses hacia la lectura en sus estudiantes y es quien incide, directamente, en su enseñanza, de ahí que realice una selección adecuada, según las potencialidades del texto, de la asignatura y las características de los estudiantes y de la carrera.
REFERENCIAS
L. R. Newcome, Unmanned Aviation: A Brief History of Unmanned Aerial Vehicles. Reston , VA: American Institute of Aeronautics and Astronautics, 2004.
C. Hong and D. Shi, “A Cloud-based Control System Architecture for Multi-UAV,” in Proceedings of the 3rd International Conference on Robotics, Control and Automation - ICRCA ’18, 2018, pp. 25–30, doi: 10.1145/3265639.3265652.
L. Ferreira, Á. Câmara, and D. C. Silva, “Construction and Integration of a Quadcopter in a Simulation Platform for Multi-vehicle Missions,” Springer, Cham, 2019, pp. 13–23.
J. Estupiñán, M. Villamar, A. Campi, and C. Luis, “Reflexiones acerca de la pertinencia e impacto de la educación superior en Ecuador desde su perspectiva actual,” Rev. Órbita Pedagógica, 2016.
A. C. Watts, V. G. Ambrosia, E. A. Hinkley, A. C. Watts, V. G. Ambrosia, and E. A. Hinkley, “Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use,” Remote Sens., vol. 4, no. 6, pp. 1671–1692, Jun. 2012, doi: 10.3390/rs4061671.
J. M. B. García, J. E. Ricardo, and I. M. Villalva, “Acciones didácticas para la autorrealización física integral de los estudiantes de carreras agropecuarias,” Didasc@ lia Didáctica y Educ. ISSN 2224-2643, vol. 7, no. 2, pp. 57–66, 2016.
I. Bhakta, S. Phadikar, and K. Majumder, “State‐of‐the‐art technologies in precision agriculture: a systematic review,” J. Sci. Food Agric., vol. 99, no. 11, p. jsfa.9693, Apr. 2019, doi: 10.1002/jsfa.9693.
U. R. Mogili and B. B. V. L. Deepak, “Review on Application of Drone Systems in Precision Agriculture,” Procedia Comput. Sci., vol. 133, pp. 502–509, Jan. 2018, doi: 10.1016/J.PROCS.2018.07.063.
P. Frankelius, C. Norrman, and K. Johansen, “Agricultural Innovation and the Role of Institutions: Lessons from the Game of Drones,” J. Agric. Environ. Ethics, pp. 1–27, Dec. 2017, doi: 10.1007/s10806-017-9703-6.
“Precision Agriculture - RMAX.” .
M. M. Ghonge, P. Jawandhiya, S. G. Gupta, and P. M. Jawandhiya, “Review of Unmanned Aircraft System (UAS) Security aware routing protocol for MANET View project vehicle routing algorithm View project Review of Unmanned Aircraft System (UAS),” 2013.
D. Perez, I. Maza, F. Caballero, D. Scarlatti, E. Casado, and A. Ollero, “A Ground Control Station for a Multi-UAV Surveillance System,” J. Intell. Robot. Syst., vol. 69, no. 1–4, pp. 119–130, Jan. 2013, doi: 10.1007/s10846-012-9759-5.
K. P. Arnold, “The UAV Ground Control Station: Types, Components, Safety, Redundancy, and Future Applications,” vol. 4, no. 1, pp. 37–50, 2016, doi: 10.14323/ijuseng.2016.4.
M. D. L. A. Franco Solorzano and A. L. Martillo Rosales, “Course drone: implementación de un sistema de navegacion para DRONES multiproposito por medio de una aplicación desarrollada con tecnologías y herramientas OPEN SOURCE,” 2018.
V. I. Kortunov, O. V. Mazurenko, A. V. Gorbenko, W. Mohammed, and A. Hussein, “Review and comparative analysis of mini- and micro-UAV autopilots,” in 2015 IEEE International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Oct. 2015, pp. 284–289, doi: 10.1109/APUAVD.2015.7346622.
“Home Page - Pixhawk.” .
L. Meier, P. Tanskanen, L. Heng, G. H. Lee, F. Fraundorfer, and M. Pollefeys, “PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision,” Auton. Robots, vol. 33, no. 1–2, pp. 21–39, Aug. 2012, doi: 10.1007/s10514-012-9281-4.
“Pixhawk 4 · PX4 v1.9.0 User Guide.” .
“Open Source for Drones - PX4 Open Source Autopilot.” .
“DroneKit.” .
L. Mottola, K. Whitehouse, and P. Di Milano, “Mobile Systems Research with Drones.”
S. Atoev, K.-R. Kwon, S.-H. Lee, and K.-S. Moon, “Data analysis of the MAVLink communication protocol,” in 2017 International Conference on Information Science and Communications Technologies (ICISCT), Nov. 2017, pp. 1–3, doi: 10.1109/ICISCT.2017.8188563.
S. Sabikan and S. Nawawi, “Open-Source Project (OSPs) Platform for Outdoor Quadcopter Optimization View project,” 2016.
“GitHub - DroidPlanner/Tower: Ground Control Station for Android Devices.” .
“GitHub - dronekit/dronekit-android: Android DroneKit implementation.” .
L. Sørensen, L. Jacobsen, J. Hansen, L. Y. Sørensen, L. T. Jacobsen, and J. P. Hansen, “Low Cost and Flexible UAV Deployment of Sensors,” Sensors, vol. 17, no. 12, p. 154, Jan. 2017, doi: 10.3390/s17010154.
“SITL Advanced Testing — Dev documentation.” .
F. Smarandache, M. A. Quiroz-Martínez, J. E. Ricardo, N. B. Hernández, and M. Y. Leyva Vázquez, “Application of neutrosophic offsets for digital image processing,” Investig. Operacional, 2020.
F. Smarandache, J. Estupiñán Ricardo, E. González Caballero, M. Y. Leyva Vázquez, and N. Batista Hernández, “Delphi method for evaluating scientific research proposals in a neutrosophic environment,” Neutrosophic Sets Syst., 2020.
M. Abdel-Basset, M. Mohamed, Y. Zhou, and I. Hezam, “Multi-criteria group decision making based on neutrosophic analytic hierarchy process,” J. Intell. Fuzzy Syst., 2017, doi: 10.3233/JIFS-17981.
S. Aggarwal, R. Biswas, and A. Q. Ansari, “Neutrosophic modeling and control,” 2010, doi: 10.1109/ICCCT.2010.5640435.
M. L. Vázquez, J. Estupiñan, and F. Smarandache, “Neutrosofía en Latinoamérica, avances y perspectivas,” Rev. Asoc. Latinoam. Ciencias Neutrosóficas. ISSN 2574-1101, vol. 14, pp. 1–8, 2020.
S. Broumi et al., “Shortest path problem in fuzzy, intuitionistic fuzzy and neutrosophic environment: an overview,” Complex Intell. Syst., 2019, doi: 10.1007/s40747-019-0098-z.
F. Smarandache and M. Leyva-Vázquez, “Fundamentals of neutrosophic logic and sets and their role in artificial intelligence,” Neutrosophic Comput. Mach. Learn., 2018.
J. E. Ricardo, D. F. C. Flores, J. A. E. Díaz, and K. P. Teruel, “An Exploration of Wisdom of Crowds using Neutrosophic Cognitive Maps,” Neutrosophic Sets Syst., vol. 37, pp. 8–15, 2020.
G. Á. Gómez, J. V. Moya, J. E. Ricardo, and C. B. V. Sanchez, “Evaluating Strategies of Continuing Education for Academics Supported in the Pedagogical Model and Based on Plithogenic Sets,” Neutrosophic Sets Syst., vol. 37, no. 1, p. 3, 2020.
Fecha de Recepción: 22 de Noviembre De 2020 Fecha de Aceptación: 21 de Diciembre 2020